




伺服液压缸工作原理
伺服液压缸是一种常见的液压执行元件,广泛应用于工业自动化领域。它通过液压系统的控制,实现对工作负载的精确控制和定位。本文将详细介绍伺服液压缸的工作原理,帮助读者更好地理解和应用这一技术。
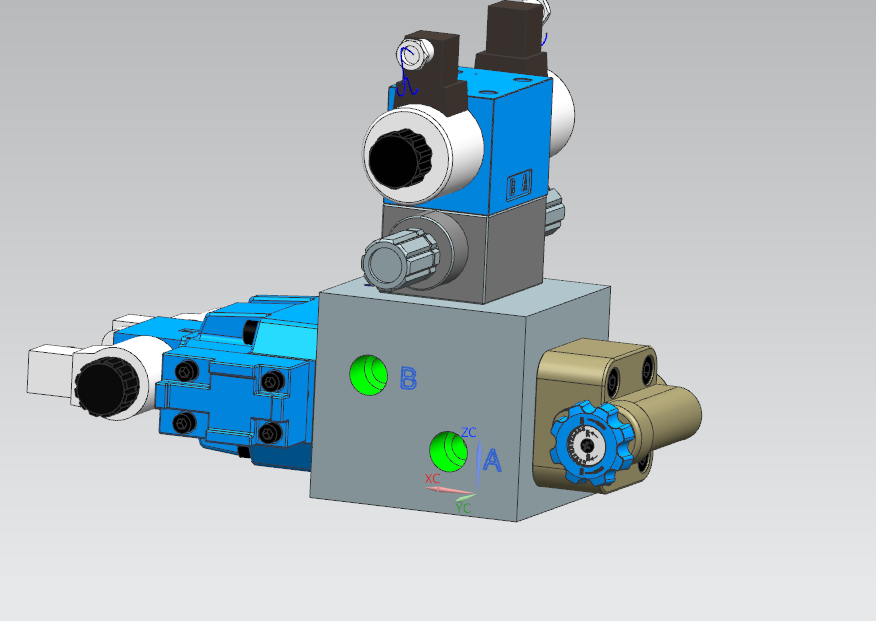
一、伺服液压缸的基本结构
伺服液压缸由液压缸、伺服阀、传感器和控制器等组成。液压缸是伺服液压缸的核心部件,它负责产生力和运动。伺服阀用于控制液压缸的运动,传感器用于检测液压缸的位置和速度,控制器则根据传感器的反馈信号,对伺服阀进行控制,实现对液压缸的精确控制。
二、伺服液压缸的工作原理
伺服液压缸的工作原理可以简单概括为:控制器接收传感器的反馈信号,根据设定的控制策略,计算出控制信号,通过伺服阀控制液压缸的运动,从而实现对工作负载的精确控制。
具体来说,伺服液压缸的工作过程可以分为四个阶段:压力阶段、加速阶段、稳定阶段和减速阶段。
1. 压力阶段:在伺服液压缸开始工作时,控制器向伺服阀发送控制信号,使伺服阀打开,液压油进入液压缸的腔体,产生压力。液压缸的活塞开始受到压力的作用,产生推力。
2. 加速阶段:在压力阶段之后,控制器根据设定的控制策略,逐渐增大控制信号,使伺服阀打开程度增加,液压缸的进油量增加,从而加速液压缸的运动速度。
3. 稳定阶段:当液压缸的运动速度达到设定值时,控制器会根据传感器的反馈信号,调整控制信号的大小,使伺服阀保持相对稳定的开度,从而保持液压缸的运动速度稳定。
4. 减速阶段:当液压缸接近目标位置时,控制器会逐渐减小控制信号,使伺服阀关闭,液压缸的进油量减小,从而减小液压缸的运动速度。当液压缸到达目标位置时,控制器停止发送控制信号,液压缸停止运动。
通过以上四个阶段的控制,伺服液压缸可以实现对工作负载的精确控制和定位。控制器根据传感器的反馈信号,不断调整控制信号的大小,使液压缸的运动速度和位置保持在设定值附近,从而实现对工作负载的精确控制。
三、伺服液压缸的应用
伺服液压缸广泛应用于工业自动化领域,特别是对于需要精确控制和定位的工作负载,伺服液压缸具有独特的优势。
1. 机床行程控制:伺服液压缸可以用于机床的进给和快速移动,通过精确的控制,实现对工件的精确加工。
2. 机器人控制:伺服液压缸可以用于机器人的关节控制,通过精确的控制,实现机器人的精确运动和定位。
3. 模具开合控制:伺服液压缸可以用于模具的开合控制,通过精确的控制,实现模具的精确开合和定位。
4. 船舶和航空领域:伺服液压缸可以用于船舶和航空领域的舵机控制,通过精确的控制,实现船舶和飞机的精确操纵。
总结:
伺服液压缸是一种通过液压系统控制的液压执行元件,它通过控制器、伺服阀、传感器和液压缸等组成,实现对工作负载的精确控制和定位。伺服液压缸的工作原理可以简单概括为压力阶段、加速阶段、稳定阶段和减速阶段。伺服液压缸广泛应用于工业自动化领域,特别是对于需要精确控制和定位的工作负载。通过了解伺服液压缸的工作原理,我们可以更好地应用这一技术,提高工作效率和质量。
(工良液压技术部整理发布,转载请标明出处)